Оглавление
1. Введение и область применения
* Классические проблемы PID-регулирования
* Оговорки и ограничения
* Термины и определения (P, I, D)
2. Автоподстройка (АТ) — Настоятельно рекомендуется!
* Принцип работы (релейный метод)
* Меры предосторожности
* Пошаговая процедура выполнения на TC4
* Возможные проблемы и их причины
3. Эмпирическая «подкрутка» на месте
* Таблица симптомов и корректирующих действий
* Основное правило настройки (последовательность)
4. Ручной расчет и настройка (Метод Циглера-Николса)
* Предупреждение о безопасности
* Шаг 1: Подготовка (обнуление I и D)
* Шаг 2: Поиск критического режима (P_cr и T_cr) (границ устойчивости)
* Шаг 3: Расчет коэффициентов для P, PI, PID-регуляторов
* Пример расчета
5. Заключение и рекомендации
6. Приложение. Чек-лист
1. Вступление.
Классическая ситуация, когда контроллер не может достичь заданного значения (уставки) и останавливается, не доходя до него, либо сильно выходит за параметры регулирования, медленно выходит на уставку, либо при регулировании заметны сильные колебания.
Разберём на примере самого распространённый из применяемых нами контроллеров компании Autonics – серии TC4.
Сразу несколько оговорок:
— Несмотря на то что в теории ПИД-регуляторы на всех приборах работают по одному алгоритму, в реальности и по опыту нашей работы прошивки сильно отличаются. И реакции на управляющее воздействие тоже. Контроллеры Autonics в этом плане — наименее проблемные в эксплуатации, так как имеют более продвинутый алгоритм, как правило, не требуют вмешательства и поэтому именно они применяются нами. Учитывайте это при манипуляциях с другими приборами.
— Данная статья ориентирована на контроллеры Autonics. При настройке других приборов уточните по документации: используется ли коэффициент усиления Kp или пропорциональная полоса — логика настройки будет отличаться
— В данном случае, мы не рассматриваем ошибки проектирования оборудования, которые могут вызывать проблемы при настройке. При наличии сочетания серьёзных ошибок проектирования и слабых, не адаптивных алгоритмов работы ПИД-регулятора, точная настройка практически невозможна.
Расчет коэффициентов PID-регулятора — это не точная математика, а скорее инженерное искусство, основанное на понимании процесса и экспериментальной настройке. Есть два основных подхода: теоретический расчет (по параметрам объекта) и практическая настройка (по отклику системы).
Поскольку мы рассматриваем конкретную модель и печь, сосредоточимся на практических методах, которые вам реально применить.
Термины и определения:
- P (Пропорциональная полоса) — Определяет величину управляющего воздействия (мощности) на текущую ошибку. Важно: в контроллерах Autonics увеличение P делает систему менее чувствительной (обратная логика по сравнению с коэффициентом усиления Kp).
- I (Интегральное время) — Устраняет статическую ошибку. Слишком малое значение → система становится агрессивной, появляются колебания. Слишком большое → медленное устранение ошибки (долго «дожимает» до уставки)
- D (Дифференциальное время) — Предсказывает будущее поведение ошибки, «тормозит» перерегулирование. Слишком большое значение -> усиление шумов и нестабильность.
Решение для контроллера Autonics TC4
2. Автоподстройка (АТ) — Настоятельно рекомендуется!
Это самый простой и эффективный способ. Контроллер сам определит параметры вашей системы (печи) и рассчитает оптимальные коэффициенты. Алгоритм АТ в TC4, является разновидностью релейного метода (подача полной мощности/отключение для анализа переходного процесса), что объясняет перегрев и длительность процесса.
Внимание! Процесс автонастройки подразумевает работу на полной мощности и может вызвать значительный перегрев выше уставки. Убедитесь, что технологический процесс и оборудование допускают такие режимы работы. Убедитесь в отсутствии садки в оборудовании. Рекомендуется проводить на пониженной уставке.
Как выполнить на TC4 (типовая процедура):
- Подготовка: Перед запуском АТ убедитесь, что температура объекта значительно ниже уставки (желательно — комнатная).
- Уставка: Установите нужное значение уставки (SV) — в вашем случае 1030°C.
- Запуск АТ:
- Перейдите в меню параметров. Параметры сгруппированы (Группы 1, 2 и т.д.). Вам нужно найти параметр, отвечающий за запуск Автоподстройки. Он может называться AT, A-T, TUNE, AE или находиться в группе, связанной с настройкой PID. В нашем случае, меню включение автонастройки находится в «Группе параметров 1»
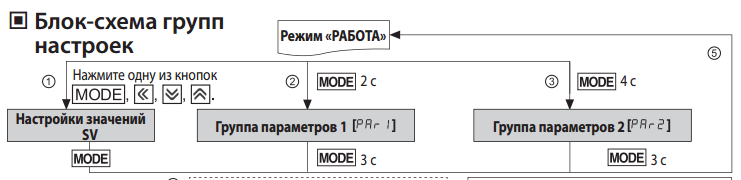
Рисунок 2.1. Блок-схема групп настроек Autonics TC4.
Активируйте функцию АТ (установите значение ON или START).
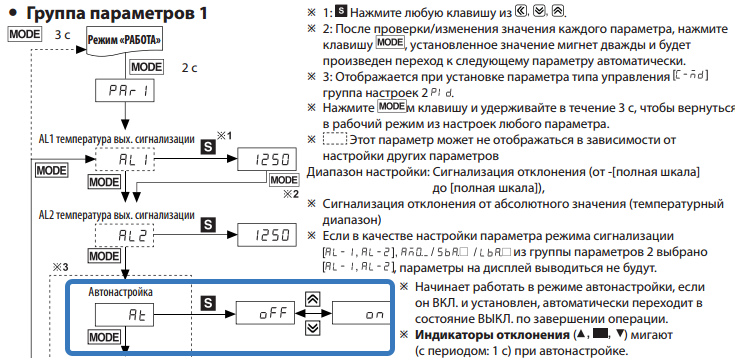
Рисунок 2.2. Активация режима автонастройки.
4. Процесс: Контроллер начнет разогрев. Он будет работать, перегревая и остывая, чтобы проанализировать реакцию системы. Индикаторы отклонения мигают с периодом 1 с.
5. Завершение: После завершения (индикатор перестанет мигать или появится сообщение об окончании) контроллер автоматически запишет рассчитанные коэффициенты P, I, D в соответствующие параметры. Вернитесь в режим отображения.
Внимание: Процесс АТ может занять значительное время (десятки минут) для высоких температур. В случае ошибок проектирования системы — может не завершиться вообще.
Это может быть вызвано, например, крайне малой мощностью нагревателей относительно массы печи (система не может выйти на режим) или наоборот, чрезмерной мощностью, ведущей к неуправляемым перегревам, неправильной установкой датчиков. В этом случае, единственное решение — ручная подстройка.
Это основной рекомендуемый метод.
3. Эмпирическая «подкрутка» на месте
После автоподстройки или ручного расчёта почти всегда требуется доводка.
Таблица диагностики
| Симптом | Причина | Что делать |
|---|---|---|
| Не достигает уставки | Слабый интеграл (I слишком большое) или слабый P (слишком большая полоса) | Уменьшить I, при необходимости уменьшить P |
| Медленно выходит на уставку | Слабое усиление (P слишком большое), слабый интеграл | Уменьшить P, уменьшить I |
| Сильное перерегулирование | Слишком сильный P (узкая полоса), слабый D | Увеличить P, добавить или увеличить D |
| Колебания (раскачка) | Слишком сильное усиление, слишком активный интеграл | Увеличить P, увеличить I |
| Долго «болтается» вокруг уставки | Недостаточное демпфирование (D) или слишком активный интеграл | Увеличить D, увеличить I |
| Дёргание выхода | Слишком большой D | Уменьшить D |
| Медленный спад после перегрева | Слишком сильный интеграл (I слишком малое) | Увеличить I |
Правило настройки:
Делайте всегда в таком порядке:
- P — добиться устойчивости (убрать колебания)
- I — убрать статическую ошибку
- D — сгладить перерегулирование
Можно запомнить так:
- P — «насколько резко реагирует»
- I — «дожимает до уставки»
- D — «тормозит перед уставкой»
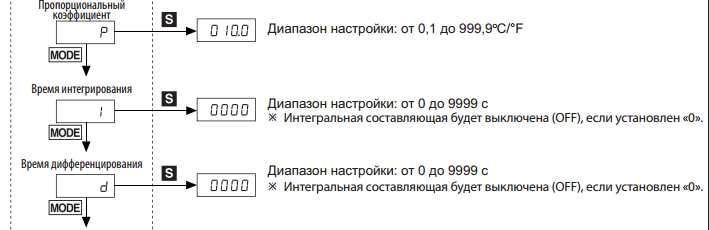
Рисунок 3.1 Меню настройки коэффициентов Autonics TC4.
4. Ручной расчет и настройка (Метод Циглера-Николса)
Если автоподстройка по каким-то причинам невозможна или дает неудовлетворительный результат, а подстройка (2) тоже не удалась — можно настроить вручную.
Классический метод — метод Циглера-Николса.
Метод требует крайней осторожности при использовании на реальном промышленном оборудовании. Вывод системы в режим незатухающих колебаний на высокой температуре (1030°C) может быть технологически недопустим или опасен (риск перегрева, повреждения футеровки, продукции). Данный метод рекомендуется использовать либо на этапе пусконаладки на пониженных температурах, либо если автонастройка невозможна, а эмпирический метод не дал результатов.
В контроллерах Autonics используется пропорциональная полоса (P), а не коэффициент усиления Kp.
То есть P обратно пропорциональна Kp.
Поэтому классические формулы применяются как ориентир, а не как точный расчёт.
Метод предполагает вывод системы в режим устойчивых колебаний. Рекомендуется проводить на пониженной уставке.
Шаг 1: Подготовка
Отключите интегральную и дифференциальную составляющие:
- I → установить максимально возможное значение (ослабить интеграл)
- D = 0
Установите P в большое значение (широкая полоса) — система будет стабильной и «вялой».
Рисунок 4.1 Меню настройки коэффициентов.
Шаг 2: Поиск критического режима (P_cr и T_cr)
Постепенно уменьшайте P (сужайте полосу → увеличиваете усиление), пока система не начнёт:
- устойчиво колебаться вокруг уставки
- с примерно постоянной амплитудой
Зафиксируйте:
- P_cr — значение P, при котором появились незатухающие колебания
- T_cr — период колебаний (время между пиками, сек)
Шаг 3: Настройка параметров
Для контроллеров с пропорциональной полосой используйте следующие ориентиры:
| Тип регулятора | Пропорциональная полоса (P) | Интегральное время (I) | Дифференциальное время (D) |
| P | 1.5–2 × P_cr | — | — |
| PI | 2–2.5 × P_cr | T_cr / 1.2 | — |
| PID | 2–3 × P_cr | T_cr / 2 | T_cr / 6…8 |
Это не точные значения, а стартовые настройки.
Получено:
- P_cr = 5
- T_cr = 300 сек
Начальные настройки PID:
- P = 10…15
- I = 150 сек
- D = 40–50 сек
После ввода параметров обязательно выполните ручную доводку.
5. Заключение и рекомендации
Совет: Начните с запуска Автоподстройки (AT). Это самый быстрый и правильный способ «рассчитать» коэффициенты для вашего контроллера. Ручные методы требуют больше времени и опыта.
Рекомендуемый порядок:
- Запустить автоподстройку (AT)
- При необходимости выполнить эмпирическую доводку
- Использовать метод Циглера–Николса только если первые два способа не дали результата
Окончательным руководством является инструкция производителя (Manual) для конкретной модели, так как расположение меню и названия параметров могут незначительно отличаться в разных версиях прошивки.
Мануалы на контроллеры, применяемые нами доступны в нашем «Центре загрузок»
Приложение. Чек-лист
1. Начните с автоподстройки (AT)
→ Запустить AT при температуре ниже уставки
→ Дождаться завершения
→ Проверить результат
2. Если результат не идеальный — доводка
Есть колебания / раскачка:
→ увеличить P
→ увеличить I
Большое перерегулирование (перегрев):
→ увеличить P
→ добавить D
Не достигает уставки:
→ уменьшить I
→ при необходимости уменьшить P
Медленно выходит на уставку:
→ уменьшить P
→ уменьшить I
Дёргание / шум:
→ уменьшить D
3. Порядок настройки
→ сначала P (стабильность)
→ потом I (точность)
→ потом D (сглаживание)
5. Если ничего не помогает
→ проверь:
- мощность нагревателей
- расположение датчика
Оптимальное расположение датчика определяется конструкцией системы и требует опыта проектирования.
Валенцев А.А.